
Guida autonoma in città , la sfida più difficile
Il traffico urbano è lo scenario più complicato per un veicolo a guida autonoma. Volkswagen sta ricercando soluzioni che garantiscano efficienza e la massima sicurezza, anche in collaborazione con IBM e alcune Università internazionali.
Già da molti anni sulle auto del Gruppo Volkswagen sono disponibili diversi sistemi di assistenza alla guida o ADAS (dall’inglese Advanced Driver Assistance Systems), per esempio il Lane Assist - che avvisa chi guida dell’eventuale superamento della linea che delimita la propria corsia di marcia - e l'Adaptive Cruise Control - che mantiene l’auto a un’adeguata distanza dal veicolo che precede. Questi dispositivi supportano il conducente incrementando il livello di sicurezza, ma si attivano solo in autostrada o su strade a scorrimento veloce, come superstrade o tangenziali.
Il traffico urbano, invece, è una sfida molto più complessa con ostacoli ben più difficili da superare. Per vincerla, Volkswagen ha unito le forze con IBM, con le Università Tecniche di Cluj-Napoca e di Praga e con il Politecnico ETH di Zurigo nell’ambito del progetto “UP-Drive” finanziato dalla Commissione Europea.
Il progetto UP-Drive
UP-Drive sta per Automated Urban Parking and Driving, l’obiettivo è chiaro: portare la guida autonoma nelle città di tutto il mondo, accelerando lo sviluppo della tecnologia, in particolare per quanto riguarda intelligenza artificiale e robotica.
“Il supporto pubblico a questo genere di ricerca è un ottimo investimento, perché può dimostrare l'eccellenza del comparto accademico e industriale europeo nel migliorare realmente le vite dei cittadini” ha dichiarato Mariya Gabriel, Commissario Europeo per l'Economia e la Società digitali.
La sfida più grande
“L'aspetto più particolare di questo progetto è il suo contesto: le aree urbane, dove le situazioni, le infrastrutture e il traffico sono estremamente differenti da una città all'altra” spiega Axel Heinrich, Responsabile di Volkswagen Group Innovation.
L'obiettivo a lungo termine del Gruppo tedesco e dei suoi partner è infatti rendere disponibile le funzioni di guida autonoma non solo sulle autostrade o in fase di parcheggio, ma anche nel traffico. “Lo scenario urbano è la sfida più grande per questa tecnologia. Quando riusciremo a gestirlo correttamente, potremo gestire qualsiasi altra situazione” sottolinea Heinrich.
L'importanza dei sensori…
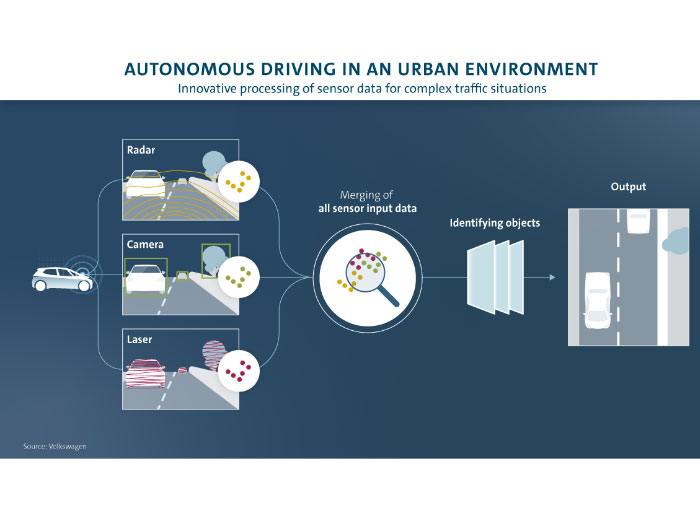
Il percorso per arrivare alla meta è lungo e prevede varie tappe: una di queste è lo sviluppo dei sensori. Un veicolo autonomo ne richiede di diversi tipi: laser, radar e telecamere sono i dispositivi che scansionano l'area intorno all'auto per individuale potenziali pericoli. Ognuno di questi valuta gli input che riceve dall'esterno ed evidenzia quelli rilevanti, che vengono confrontati mediante l'intelligenza artificiale e connessi l'uno all'altro. È un approccio che funziona bene sulle strade a scorrimento veloce, ma nel traffico cittadino ha dei limiti.
…dei processori…
Così, i ricercatori del progetto UP-Drive hanno sviluppato e implementato un nuovo metodo: anziché processare i dati singolarmente, ogni sensore li invia subito a un processore centrale che li correla. Da questa serie di dati si estraggono solo quelli rilevanti; così, nel passaggio dal sensore al processore centrale, non si perde alcun dato importante per il quadro finale – per esempio, la posizione esatta di un pedone in una frazione di secondo.
La precisione è fondamentale e dunque la calibrazione dei sensori è importantissima e deve essere garantita in ogni momento: non deve essere compromessa da un sassolino che sbatte sul paraurti o dagli sbalzi termici, per esempio.
…e della calibrazione
Per questo il sistema ripete la calibrazione “online”, ovvero in modo costante durante la marcia e se rileva un’imperfezione reagisce nel giro di 100 millisecondi e compensa l'errore. Un’ulteriore novità è che i dati provenienti dai diversi sensori sono confrontati in modo intelligente, con il risultato di poter contare su una significativamente maggiore precisione e di garantire la piena funzionalità del veicolo in ogni momento. Questa tecnologia potrebbe debuttare presto sulle auto di serie.
Mission Autonomous Driving

Il progetto “Mission Autonomous Driving” è stato attivato dal Gruppo Volkswagen negli Stati Uniti all'inizio del terzo millennio. Durante il DARPA Grand Challenge, evento promosso dalla Defense Advanced Research Projects Agency (Agenzia governativa del Dipartimento della Difesa degli USA incaricata dello sviluppo di nuove tecnologie per uso militare), una Volkswagen ha guidato da sola nel deserto del Mojave, in Nevada. Già nel 2007 sono state effettuate le prime sperimentazioni sulla guida autonoma in aree urbane. Nel 2017 è stato presentato il concept SEDRIC – acronimo di SElf DRIving Car – per offrire un’anticipazione sull'aspetto che i veicoli “driverless” potrebbero avere in futuro: disponibili al semplice tocco di un pulsante, sostenibili, confortevoli e sicuri.
Oggi è il conducente a svolgere la maggior parte dei compiti nel traffico, ma gradualmente la sua responsabilità sarà trasferita al veicolo. Ciò significa che i sistemi saranno in grado di agire indipendentemente e senza l'intervento umano, inizialmente per un periodo di tempo limitato e in condizioni adeguate e predefinite. La ricerca congiunta svolta nell’ambito del progetto “UP-Drive” ha un ruolo importante nell’ottica dell’ulteriore sviluppo della tecnologia e di un livello di sicurezza sempre maggiore.
Fonte: Volkswagen AG